



產品描述
【三種工作模式】
(1)根據現場使用場景進行基礎參數的設置,通過PLC控制系統的大滯后、模糊控制理論為基礎的校正專家智能控制系統,自動對膠帶跑偏進行分析,主動輸出控制信號控制智能化校正進行主動校正,并在使用過程中通過機器深度學習可以不斷優化使用情況,更好的滿足生產的需要;實現數字化工廠對輸送皮帶設備部分的精準控制和數字孿生。
(2)控制邏輯用單傳感器配合現場視頻監控系統,干涉校正達到膠帶繼續運行等待傳感器到位進行更換完成。
(3)當校正系統出現問題不能短時間恢復還可以脫開主動校正,利用原有校正裝置實現跟隨校正,保證生產的繼續。
【技術特點】
◎ 膠帶數字智能校正系統為主動檢測、識別、校正,并具備自主學習優化功能;
◎ 膠帶數字智能校正系統應能適應潮濕、原煤易自燃、粉塵大、濺水頻繁、振動等長期惡劣工作環境的考驗;
◎ 膠帶數字智能校正系統必須滿足長期連續運行的要求,啟動、運行和停機應平穩并安全可靠。可以實現全部自動運行;
◎ 膠帶數字智能校正系統應能隨帶式輸送機工況對其自動校正;
◎ 膠帶數字智能校正系統應動作靈活,自動檢測皮帶跑偏的趨勢并能隨機予以校正,靈活服務于生產,可與系統連鎖;
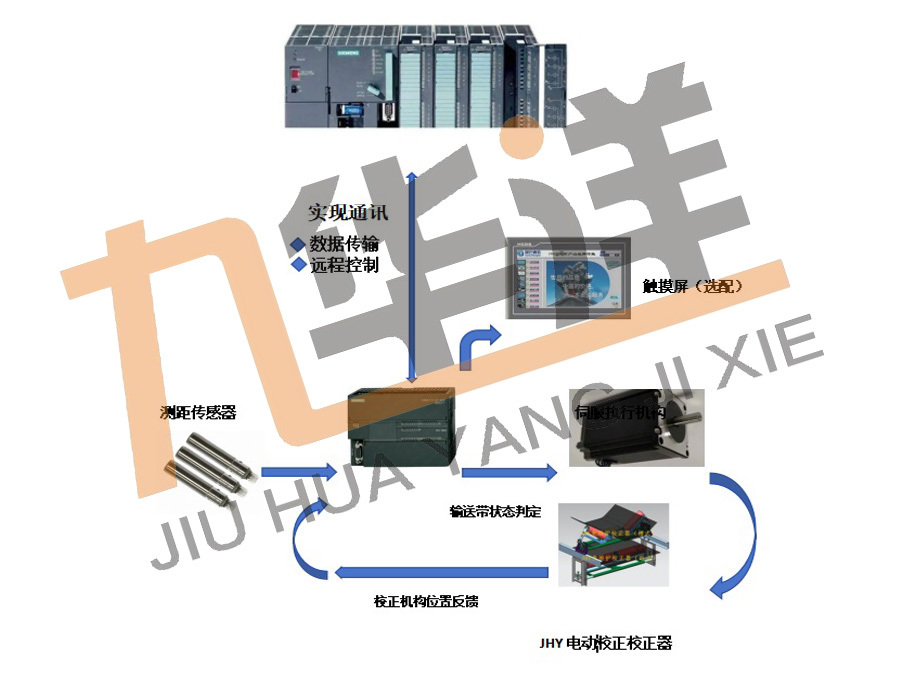
【工作原理】
通過激光測距傳感器對膠帶的橫向位移準確判斷膠帶的實時跑偏量,輸出控制信號控制動智能校正裝置進行主動糾偏,并讀取糾偏裝置的位置數據,反饋給控制系統收集存儲,完成現場級別輸送帶的數據準確采集,通過相應算法及控制理論的應用,邏輯編程實現趨勢糾偏控制與互聯。
【工作流程】
(1)激光測距傳感器檢測:傳感器感知到皮帶的位置偏移,工業級測距傳感器測量精度±2mm,并有效適應皮帶的跳動時穩定檢測,并將信號傳遞給PLC控制系統;
(2)信號處理:PLC對傳感器信號進行預處理和算法分析,判斷皮帶是否偏移,并計算出輸送帶狀態做出相應的校正命令包含方向和調整量等數據;
(3)控制信號生成:控制電路根據計算結果生成相應的控制信號;
(4)控制信號傳輸:控制信號通過驅動模塊送到執行機構;
(5)輸送帶調整:執行機構根據接收到的信號,對皮帶進行調整,使其回到正確的位置;
(6)執行機構返回原始位置等待下次校正命令;
(7)重復循環:上述步驟循環執行,持續對皮帶進行自動閉環伺服校正。

JHY激光智能化校正系統
-糾偏精度20mm")



在線留言
洛陽九華洋機械設備有限公司

掃一掃 關注九華洋
掃一掃 加微信